CAPÍTULO 6: Antenas para seguimiento de satélites
Se detalla el porqué de la polarización circular para operar con los LEO y las antenas más adecuadas para alcanzarlos y recibirlos.
Polarización de las antenas de un Cubesat
La polarización con la que llega la señal emitida por un satélite LEO no se sabe muy bien cuál es, porque con el giro del satélite la polarización cambia constantemente, lo que provocaría un fuerte QSB (fading o desvanecimiento) en la recepción con cada giro, si nuestra antena tiene polarización lineal ya sea horizontal o sea vertical. Concretamente se anula la señal cuando el campo eléctrico llega perpendicular a nuestra antena lineal, lo que hace muy variable la recepción de sus señales, con un par de anulaciones por cada giro.
Para evitar este problema, lo primero que se nos ocurre es colocar dos dipolos cruzados uno horizontal y otro vertical, conectados en paralelo para poder captar tanto una señal de polarización horizontal como la vertical (figura 1), pero el resultado real es que el efecto que conseguimos con la conexión en paralelo es el de una antena con polarización lineal, pero a 45º, la bisectriz del ángulo que forman, de forma que el problema del QSB sigue existiendo exactamente igual.
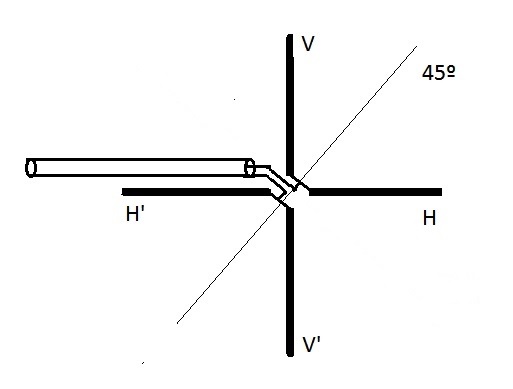 |
| Figura 1: Polarización H+V = a 45º |
Antena de polarización circular
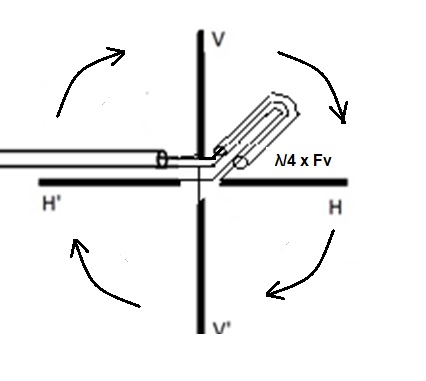
La solución más efectiva contra el QSB consiste en utilizar antenas de polarización circular mediante la conexión de dos dipolos cruzados unidos en paralelo con un desfasador de 90º intercalado entre los dos dipolos, desfasador que imprime un giro a la polarización a la velocidad de la frecuencia de transmisión, tal como se muestra en la figura 2:
 |
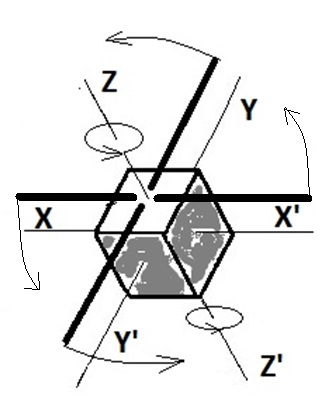 |
| Figura2: Polarización circular con dipolos | Figura 3: ¿Cubesat con polarización circular? |
Para conseguir que la polarización circular gire a derechas, o sea en el sentido de las agujas del reloj, el centro del coaxial debe ir conectado primero a una de las ramas, por ejemplo la rama V, y luego, mediante la conexión de un defasador de λ/4 eléctricos, hacerla llegar un cuarto de ciclo más tarde (90º) a la rama H del otro dipolo, la rama situada justo a la derecha de la V anterior vista por detrás. En el siguiente cuarto de ciclo, el mismo campo eléctrico llega a la rama V’ y en otro cuarto de ciclo más tarde llegará a la rama H’, para volver de nuevo a la V en el cuarto de ciclo final. Para conseguir que el giro circular sea opuesto a izquierdas, bastaría con conectar el centro del trozo del coaxial desfasador a la rama H’ en lugar de la H.
¿Polarización circular o giratoria de un cubesat?
El problema del Cubesat es que es sus caras son muy pequeñas y ya da mucho trabajo colocar un dipolo con dos ramas de flexo enrolladas en la cara superior y otra en la inferior, lo que hace muy difícil la colocación de dos dipolos cruzados que emitieran con polarización circular (figura 3), así que normalmente todos se limitan a colocar un solo dipolo por banda en cada cara y solamente la ISS transmite con polarización circular, porque no tiene problemas en lo que se refiere al tamaño de la antena.
Así que casi todos los Cubesat transmiten normalmente con polarización lineal aunque giratoria porque varía al ritmo de su propio giro, de modo que te toca a ti, el receptor, resolver el problema del QSB en la recepción de las señales con polarización giratoria, problema que podemos resolver fácilmente mediante el uso de una antena receptora de polarización circular. En transmisión también enviará una emisión con polarización circular que, a su vez, será recibida por los dipolos del Cubesat sin apenas QSB.
La ventaja de la recepción circular
La ventaja de la recepción mediante una antena de polarización circular estriba en que solo se pierden -3 dB respecto a la recepción de una señal de polarización lineal, sea cual sea su polarización. De este modo, al recibir un Cubesat con una antena de polarización circular se pierde algo de nivel de la señal, pero se supera muy bien el problema del desvanecimiento ocasionado por el giro cuando la polarización llega perpendicular a la de nuestra antena lineal y la recepción deviene mucho más estable.
Esto significa que no sale demasiado a cuenta instalar un conmutador de polarización circular derecha/izquierda en una instalación de recepción de satélites con antenas de polarización circular, porque la mayoría de Cubesats disponen de una antena que transmite con polarización lineal y los -3dB los perderemos igual, tanto si nos llega la señal con polarización vertical como horizontal.
Las antenas óptimas para satélites
Para hablar de las antenas más convenientes para satélites, creo que lo mejor es empezar por el sistema de antenas óptimo para recibir todos los satélites y que consiste en colocar dos antenas Yagi cruzadas independientes, una para transmisión y otra para recepción, ambas con desfasador para obtener polarización circular y controladas por ordenador, de forma que permanezca perfectamente apuntadas hacia la trayectoria del satélite. (figura 4).
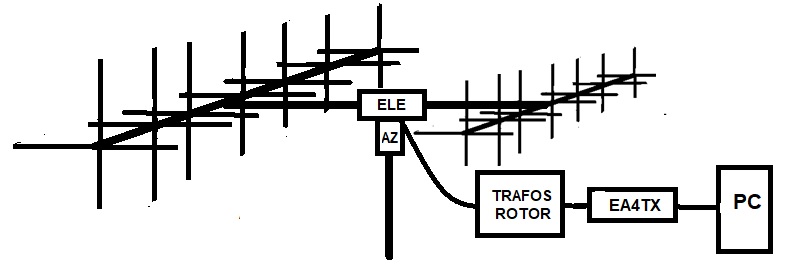 |
| Figura 4: Dos Yagis cruzadas de polarización circular controladas por ordenador |
Normalmente basta con una Yagi de 2 x 6 elementos para 146 y otra Yagi de 2 x 9 el. para 436 MHz apuntadas con rotores de elevación y acimut, como el Yaesu 5600, 5500 o 4500 y con seguimiento por ordenador mediante una controladora USB de EA4TX. La ganancia recomendada es de unos 12 dBi para 146 y de unos 14 dBi para 437 MHz, lo que representa unos 6 elementos para VHF y unos 9 para UHF.
Más adelante, en otro capítulo hablaremos de las antenas más simples como serían las omnidireccionales y que nos permitirán llegar bastante bien a todos los Cubesat sin una instalación tan complicada.
Rotores con acimut y elevación
 |
 |
| Figura 5: Rotor de elevación del Yaesu 4500 | Figura 6: Controlador ARS -USB de EA4TX |
El rotor más recomendable para manejar un par de antenas de seguimiento de satélites es alguno de los dobles rotores AZ-ELev de Yaesu, el 5600, 5500 o el 4500 (figura 5), de los que existen una versión con transformadores de CA y que necesita 12 hilos de control 2 x 6 = 12) (4500) y uno más moderno 5500 y 5600 alimentados con motores de CC, que necesitan menos hilos de control que los de CA (2 x 5 =10) y con el que te sobran 2 hilos para enviar la alimentación a los preamplificadores si te interesa.
Los rotores ya sean de CA o la CC utilizan una alimentación de baja tensión, porque como todo elemento exterior no deben funcionar con tensiones superiores a 50 V, por lo que acostumbran a emplear tensiones de 24 V en CC y de 33 V en CAlterna, tensiones mucho más apropiadas para el uso en exteriores que la tensión de red de 230 V.
Además de los transformadores y mandos de movimiento de elevación arriba/abajo, y derecha/izquierda de acimut, las unidades de alimentación disponen de indicadores de la posición de los rotores que vienen dadas por potenciómetros instalados en el interior de cada rotor y que proporcionan dos tensiones variables que mueven indicadores analógicos de acimut de 360º y de elevación de 180º.
La interface ARS-USB de EA4TX
Para controlar los rotores con un programa de seguimiento como el SatPC32,, necesitamos además intercalar una unidad de control USB inteligente que nos permita manejar los relés de los rotores desde el programa, y uno de los elementos más utilizados por su diseño y comodidad de conexión es la interface USB de EA4TX (figura 6) que nos permite controlar 5 relés (dos para subida-bajada, otros dos para derecha-izquierda y un quinto por si se necesita controlar un freno).
Mediante 4 pulsadores y el programa ARSVCOM instalado en el PC podremos manejar remotamente los 4 pulsadores de los dobles rotores Yaesu y también los de cualquieras otro rotor, como los Prosistel, Ham IV o TX2, aunque estos dos últimos necesitan el control del quinto relé para desactivar el freno mecánico interior y para los que existen muchos esquemas en Internet con instrucciones para modificarlos y conectarlos también a la unidad ARS-USB.
El programa ARSVCOM
En el PC, para comunicarnos con los rotores mediante la interface ARS-USB, necesitaremos instalar el programa de control correspondiente ARSVCOM, que dispone de una pantalla gráfica muy cómoda de manejar (figura 7), puesto que basta clicar con el ratón en cualquier rumbo o dirección acimutal que deseemos, tanto de acimut como de elevación (línea indicadora azul), para que inmediatamente la unidad USB accione sus relés internos, previamente conectados con la unidad de control de los motores del doble rotor, para que nuestras antenas se muevan hasta la posición real indicada por una línea roja y, cuando coincida con la línea azul de la dirección solicitada, se detenga su movimiento.
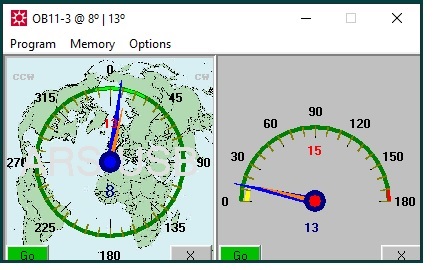 |
| Figura 7: El programa de control ARSVCOM de EA4TX |
Por supuesto que deberemos averiguar previamente con el Administrador de Dispositivos del Windows el número del puerto COM que el Windows se ha dignado concederle al ARS-USB, y deberemos colocarlo en la configuración del programa ARSVCOM para que se comuniquen entre ellos.
Además, al iniciarse el programa ARSVCOM, crea por su cuenta un segundo puerto COM virtual, distinto del anterior, cuyo número deberemos buscar también para colocar en el programa SatPC32 para indicarle el puerto COM virtual con el que deberá comunicarse con el dispositivo ARS-USB (figura 8), para enviarle el rumbo acimutal y la elevación del satélite que permitirá que los rotores realicen hacer el seguimiento en tiempo real.
El EA4TX se puede configurar directamente como ARS (figura 8) en las nuevas versiones del SatPC32, en las que ya aparece en el listado de rotores, pero cuando yo instalé esta interface, todavía no estaba disponible para el ARS, así que yo lo configuré como si el EA4TXfuera un rotor M2, porque el programa ARSVCOM del EA3TX dispone de la posibilidad de simular que es el controlador de un rotor M2 y esa configuración me ha funcionado siempre perfectamente, por lo que ya nunca más la he cambiado, siguiendo el axioma de que “si algo funciona bien, no lo cambies”.
 |
| Figura 8: Configuración del ARS-USB |
Activación de los rotores
Para que se ponga en marcha el seguimiento de un satélite en tiempo real, en el SatPC32 debemos clicar sobre el recuadro de comando “R-“ para que cambie su signo por “R+”, con lo que le indicamos que a partir de ahora envíe la posición calculada en cada momento para el seguimiento automático, en cuanto asome el satélite por el horizonte.
El programa SatPC32 solo activa los rotores si el valor calculado del ángulo de elevación del satélite escogido supera el valor “-3º”, pero permanece inactivo si el satélite escogido se encuentra mucho más abajo del horizonte. De esta forma, para cuando el pájaro asome realmente por el horizonte y la elevación alcance valores positivos (elev. > 0º), el rotor ya habrá tenido tiempo de alcanzar al acimut deseado.
Comprobación de rotores
El problema es que si no tenemos un satélite sobre el horizonte o por encima de -3º, no se activan los rotores y no podremos comprobar que es correcta toda la configuración realizada. Entonces ¿cómo podremos comprobar previamente que todo ha quedado debidamente bien configurado?
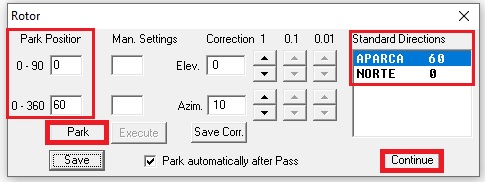 |
| Figura 9: En la configuración “Rotor” podemos ensayarlo todo |
La solución es recurrir a la pestaña “Rotor” y activar unas direcciones “Standar Directions” (figura 9) o definir una posición “Park Position”, distinta a la posición actual de las antenas y pulsar sobre la opción “Park” o “Continue” para comprobar que se activan los rotores y nuestras antenas de mueven debidamente hasta cumplir las instrucciones del aparcamiento en reposo.
Pase por el Sur: la inversión de las antenas
El problema que se nos presenta es que, como la mayoría de los rotores, los Yaesu disponen de un tope para evitar que los rotores puedan girar más de una vuelta completa y puedan seguir girando más de una vuelta en el mismo sentido y arrancar los cables de las antenas.
Este tope se encuentra generalmente colocado en la dirección sur (acimut 180º). Esto significa que, cuando el satélite en su movimiento girando en sentido contrario a las agujas del reloj llegue a alcanzar el acimut 179º y pretenda pasar al rumbo 181º, se encontrará con que el tope del rotor se lo impide.
Entonces, se interrumpe su movimiento y el giro empieza a cambiar de sentido para moverse igual que las agujas del reloj hasta dar toda la vuelta completa de casi 360º en sentido contrario, para poder continuar el seguimiento en los 181º al otro lado del tope. Durante el tiempo que dura todo ese recorrido se deja de apuntar al satélite.
Si disponemos de un rotor (como los Yaesu) con elevación que pueda superar los 90º de elevación y alcanzar los 180º, de forma que las antenas puedan quedar horizontales en posición opuesta, este problema SatPC32 lo resuelve muy fácilmente. El programa dispone de un algoritmo inteligente que detecta las órbitas con pasarán por el sur del observador e invierte automáticamente las antenas, “elevándolas” a una posición opuesta (180º – º elev.) para poder seguir el satélite con las antenas en posición invertida, sin necesidad de tener que dar una vuelta completa al rotor para proseguir el seguimiento al otro lado del tope (figura 10).
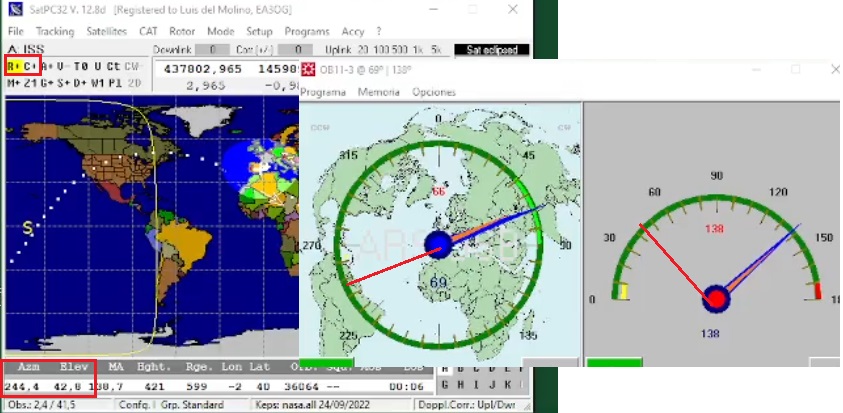 |
| Figura 10: Flipping: Acimut 245º-180º = 65º y elevación 180º-42º = 138º |
Esta operación invierte las antenas y convierte el pase por el “sur” en un pase por el “norte” donde no hay tope y el programa lo señala poniendo un fondo amarillo al comando “R+”. Este movimiento es algo desconcertante, porque de pronto nuestras antenas se mueven de una forma inesperada que no coincide con el acimut y la elevación prevista e indicada para el satélite, sino que el nuevo acimut al que señalan es el acimut indicado ± 180º y la elevación nueva es 180º – la elevación prevista. Así que daros por avisados y no os pongáis nerviosos.
La configuración de los puertos CAT
Para conectar el equipo con el ordenador para corregir el Doppler, hay que configurar bien los puertos COM que realizarán la interface con el conector CAT de cada uno de los dos equipos y que vendrán dados por un puerto físico en el caso de un equipo clásico, o mejor actualmente, por un puerto COM generado por la conexión USB de los equipos más moderno o bien por un COM virtual que deberemos instalar en el caso de que utilicemos un receptor SDR.
El número que el Windows les ha concedido a estos puertos COM hay que averiguarlo buscando el número que se ha dignado concederles el SO Windows, al que podéis acceder directamente con Windows 10 y 11 escribiendo las palabras mágicas “Administrador de dispositivos” en el buscador del propio Windows (figura 11).
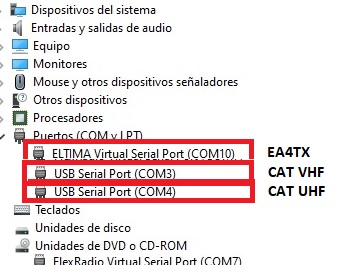 |
| Figura 11: Administrador de dispositivos del Windows |
Una vez abierto el Administrador de dispositivo, debemos descubrir el número de COM que le ha concedido el Windows a la conexión con el equipo. Modernamente casi todos los equipos proporcionan ya una conexión USB entre PC y transceptor que transporta los dos “streams” de audio (TX y RX) y también emula un par de puertos COM virtuales, uno para el CAT y otro para el PTT, los cuales aparecen y desaparecen al enchufar y desenchufar el cable USB del equipo, lo que permite distinguirlos fácilmente de otros dispositivos que puedan utilizar otros puertos COM, como sería por ejemplo la utilización del puerto COM virtual para conectar el programa de seguimiento con el programa ARSVCOM de EA4TX para controlar los rotores.
Conexión CAT entre SatPC32 y el PC
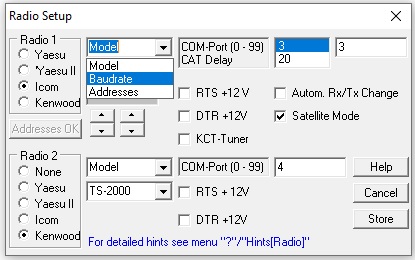
La configuración del la conexión CAT entre el programa SatPC32 y nuestros equipos control del Doppler se realiza abriendo la pestaña Setup -> RadioSetup y seleccionando primero el equipo entre allí las opciones que allí se nos proporcionan, teniendo en cuenta que el número del puerto COM virtual o físico adjudicado deberemos haberlo averiguado previamente en el Administrador de Dispositivos del Windows.
 |
| Figura 12: Conexión CAT de los puertos COM en Setup -> Radio Setup |
Un par más de detalles importantes
También necesitamos saber un par de detalles más que son difíciles de descubrir sin leerse muy a fondo los manuales: el primer truco consiste en que, si utilizamos un SDR adicional para la recepción mediante el programa Radio-Console de Simon Brown, este responde a todos los comandos CAT de un Kenwood TS-2000, así que deberemos configurarlo como este modelo y colocar aquí el número del puerto COM virtual (un cable virtual de conexión que deberíamos previamente instalar en nuestro ordenador) que establecerá la comunicación interna entre el SatPC32 y el Radio-Console, con el número que le haya otorgado el Windows en el Administrador de dispositivos.
El segundo truco que debemos saber es que, en el caso de que el equipo principal sea una conexión física (USB) y no virtual, la velocidad del puerto COM en baudios es esencial que sea exactamente la misma de la configuración interna del equipo de radio, pero en el SatPC32 este valor en baudios está inesperadamente oculto (figura 12) debajo de “Model”.
Clicando sobre la opción “Model”, debajo se abre un desplegable oculto en el que encontraremos la opción de los baudios (“Baud”) y deberemos colocar allí la misma velocidad con la que está configurado el puerto COM del equipo transmisor. En cambio, si el puerto COM es virtual, porque utilizamos un SDR, esta velocidad es indiferente porque el SDR acepta cualquier valor que se haya colocado aquí en este campo.
Si el equipo es un ICOM, además tendremos que configurar unas direcciones “Adresses” que varían según sea el modelo del equipo que utilizaremos porque se utilizan para distinguirlos en caso de que se manejen varios equipo distintos por control remoto.