Los hechos
Ya he comentado en algún artículo anterior que se me ocurrió comprobar la decodificación de mis propias transmisiones digitales en modos ROS y FT8 en los receptores WebSDR de la asociación de radioaficionados andorrana ARDAM, situados en Ordino (Andorra), y he comprobado que prácticamente me decodifico siempre en 80 metros (con un 98% de probabilidades) y casi siempre también en 60 y 40 metros (89% y 85%). Y en una buena parte de las ocasiones, la decodificación en 14 Mhz ha sido correcta, incluso cuando la ionosonda del Observatorio del Ebro informa de que la MUF (Máxima Frecuencia Utilizable) para la distancia de 100 km es demasiado baja, porque no llega a los 5 MHz.
Estos resultados generan muchas preguntas cuyas respuestas todavía ignoro: ¿Cuál es el modo de propagación que permite estas comunicaciones NVIS (Near Vertical Incidence Skywave), justo cuando se consideraba hasta la fecha que no eran posibles? ¿Hay alguna otra capa reflectora de la ionosfera que las posibilita? ¿Se produce algún otro fenómeno que permite esta propagación que desconocíamos?
El objetivo de este artículo es por supuesto animar a otros radioaficionados a realizar también pruebas similares con los receptores WebSDR (www.websdr.org), para intentar aumentar nuestros conocimientos sobre la propagación NVIS y con ello contribuir de algún modo a paliar las consecuencias de un posible y temido “blackout” eléctrico futuro.
El temido blackout eléctrico
Se entiende por blackout eléctrico la posibilidad (desgraciadamente no tan remota) de que la Tierra se vea impactada directamente por una gran fulguración solar, como la que tuvo lugar en 1859 (hace 161 años), que fue llamada “Fulguración Carrington” que destruyó las pocas estaciones telegráficas existentes hasta la fecha, por culpa de las gigantescas tensiones y corrientes inducidas en las líneas telegráficas de gran longitud, por las variaciones experimentadas del campo magnético terrestre.
Estos fenómenos se considera que afectan a la Tierra con una periodicidad media aproximada de cada cien años, período deducido de las auroras boreales excepcionales observadas en latitudes medias europeas a lo largo de la historia. Hasta la fecha nos hemos escapado ya de alguna de ellas por los pelos, es decir, por muy pocos días. Por ejemplo, en Junio de 2013, cuando una fulguración cruzó la órbita de la Tierra una semana antes de nuestro paso por esa posición.
Las consecuencias actuales de un impacto directo de una erupción solar serían un buen daño a la mayoría de satélites de comunicaciones y de las estaciones transformadoras que realizan el transporte de energía eléctrica por alta tensión, lo que requeriría meses para su reposición y vuelta a un funcionamiento normal, con un caos previsible de larga duración.
Dado el interés actual de la Unión Europea por prevenir esta remota posibilidad, de ahí su insistencia en que cada país europeo disponga de una red de emergencia de comunicaciones con alimentación autónoma, capaces de proporcionar comunicaciones NVIS a media distancia (entre 50 y 500 km), por lo que es muy importante que intentemos averiguar qué fenómenos favorecen estas comunicaciones y hagamos tolo lo posible por mejorar nuestra preparación para llevar a cabo estas comunicaciones con éxito.
La ventaja digital sobre SSB y CW
Las comunicaciones NVIS en SSB y CW en 80, 60 y 40 metros son muy adecuadas en las condiciones actuales para comunicarnos a distancias inferiores a 500 km, pero la falta de ionización suficiente imposibilita también los contactos en banda lateral única de un modo fiable, mientras que en modalidades digitales no hay ningún problema para conseguir una comunicación efectiva.
Algunas modalidades de las que ahora disponemos los radioaficionados de teclado a teclado, como el ROS y el JTDX, tienen una ganancia sobre la Fonía y la CW que podemos estimar en unos +30 dB para SSB y unos +20 dB en CW. Eso equivale a multiplicar la potencia del emisor en un factor de 1000 y 100 veces respectivamente. ¿Por qué tanta ventaja?
Pues porque entre los sistemas teclado a teclado, el ROS se decodifica bien hasta relaciones de señal/ruido de -20 dB, así como el JTDX (basado en el FT8) que también consigue decodificaciones con señales aún algo inferiores de hasta -23 dB, aunque su autor, Joe Taylo, K1JT, presuma de que llega hasta -26 dB de S/N, cifra que nunca he visto en la práctica. Por otra parte, para comprender bien el audio de una señal de SSB se necesita una relación señal/ruido de entre +6 y +10 dB, aunque para decodificar la CW, basta con relaciones señal/ruido alrededor de los 0 dB para oídos bien entrenados.
Se decodifican también los 20 m en ROS
Lo más asombroso en mis transmisiones desde Barcelona es que consigo decodificaciones perfectas en Ordino también en 20 metros, con una probabilidad hasta la fecha de casi el 80% (79%), porcentaje calculado por el número de ocasiones en las que consigo recibirme perfectamente en esa banda, cuando la MUF para 100 km está incluso por debajo de 5 Mhz.
Desafortunadamente, en Ordino no hay más que cuatro receptores Funcube Pro+, dos de ellos conectados a una antena dipolo Morgain para 80 y 40 m, un tercero a una antena bazooka para 20 m y un cuarto a una miniWhip (látigo con preamplificador) para 60 metros, por lo que no he podido comprobar por ahora si esta misteriosa propagación es capaz de reflejar frecuencias superiores a los 14 MHz.
La distancia
La distancia cubierta según el Google Earth entre BCN y Ordino es de unos 140 km que podrían ser alcanzables por onda directa, gracias a la altitud de Ordino (1300 m) de acuerdo con la fórmula para el cálculo aproximado de la distancia para la comunicación visual en VHF y superiores, teniendo en cuenta que la diferencia de altitud entre Ordino y mi antena en Barcelona es de 1200 m (1300 – 100 = 1200), puesto que Google Earth afirma que mi antena está situada a 98 m (100 m redondeados) sobre el nivel medio del mar. Aquí tenemos el cálculo de acuerdo con la fórmula proporcionada por Francisco José Dávila, EA8EX, un maestro añorado que lo sabía todo en cuanto a la propagación que escribía en la revista CQ.
d (km) = 4,5 x √(h en metros) = 4,5 x √ (1200) = 155 km > 140 km
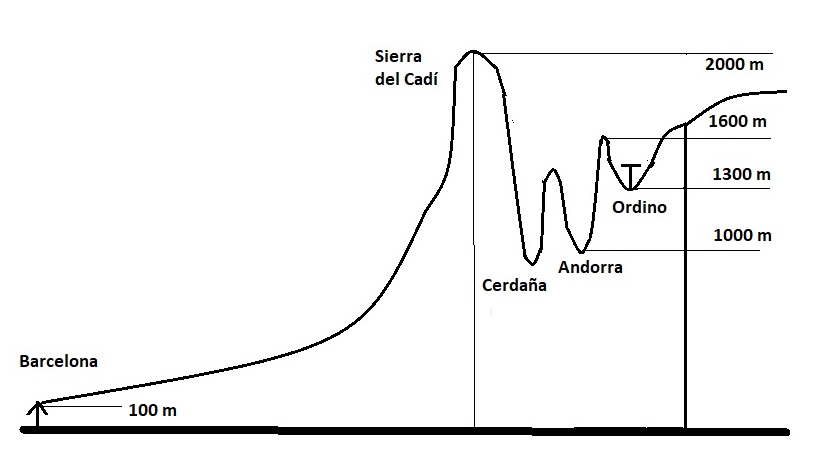 |
| Figura 1: Perfil no a escala entre Barcelona y Ordino (Andorra) |
En principio, el contacto, sería factible en directo, gracias a la gran altitud de Ordino, si no fuera porque los receptores están situados en esa población, que se encuentra en su propio valle de Andorra, tapados por cumbres más elevadas de 1600 m de altitud y, pasados los valles de Andorra la Vieja y de la Cerdaña, se encuentra interpuesta la sierra del Cadí, con alturas alrededor de los 2000 metros, tal como muestra el perfil aproximado de la figura 1, trazado más o menos con las indicaciones del cursor de Google Earth . No hay duda de que no hay la menor posibilidad de que el contacto sea vía directa, ni que actúe alguna difracción en los bordes de las montañas ni nada parecido.
También en Mallorca
Durante un buen período de tiempo, gracias a la gentileza de Jaime Sancho, EA6GK de Mallorca, dispuse para estas pruebas de un segundo receptor SDR cerca de Mallorca, a unos doscientos kilómetros al sur de Barcelona, en que pude comprobar que en 40 metros, la propagación NVIS hacia el Sur era similar a la dirigida hacia el norte en Andorra, aunque con lecturas S/N siempre completamente distintas, pero obteniendo un promedio de lecturas unos -2 dB sobre las obtenidas en Ordino hacia el norte, seguramente debidas a la diferencia de distancias. Desgraciadamente, extraños problemas con el router que no informaba bien de su IP a DynDNS y la salud de Jaime Sancho, han sido problemas insalvables para proseguir estas experiencias y obtener más controles.
El equipo de pruebas
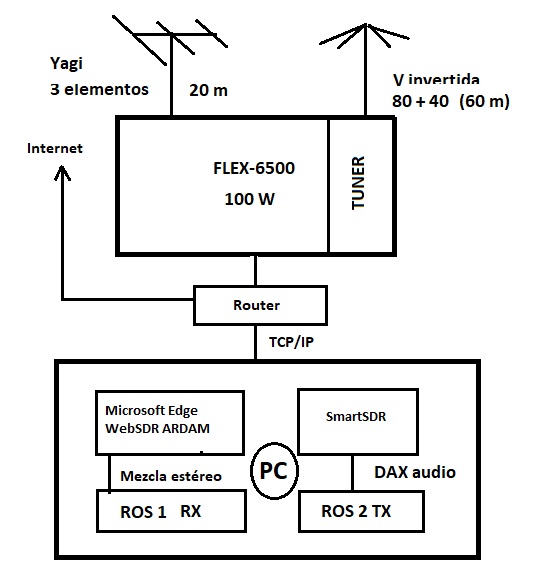 |
| Figura 2: Estación de pruebas EA3OG |
En la figura 2 se puede contemplar mi instalación para realizar las pruebas de decodificación, que es muy simple gracias al uso de un transceptor SDR FLEX-6500, y de un solo PC, en el que corren cuatro programas simultáneamente bajo Windows 10. Para recibir los WebSDR no sirve el navegador Chrome porque este navegador hace tiempo que no recibe el audio del los WebSDR, así que utilizo el navegador Edge o el Firefox indistintamente.
El equipo Flex-6500 resiste muy bien los 100 W en digital con un ciclo de funcionamiento de un 50% RX/TX y el PC es un Intel I5 de cuatro núcleos y 6 Gigas de memoria, que no tiene ningún problema en manejar estos cuatro programas simultáneamente, aunque tampoco los tiene mi PC portátil que es mucho más lento, pues el programa SmartSDR del Flex-6500 solo necesita una tarjeta gráfica medio decente.
Tengo además la ventaja de que el Flex se puede utilizar en cualquier PC de mi red local y también me permite conectarlo directamente de forma remota desde cualquier parte del mundo, así que muchas de estas pruebas las he efectuado conectando por remoto desde mi segundo QTH en Vilassar, desde el que pongo en marcha toda la estación de BCN mediante un conmutador TCP/IP.
Mezcla Estéreo de Windows
El audio de recepción de Ordino puedo extraerlo del navegador Firefox mediante el dispositivo Mezcla Estéreo, un dispositivo adicional que aparece en Windows cuando las placas del PC disponen de una tarjeta de audio Realtek High Definition Audio. La Mezcla Estéreo es un dispositivo de “Entrada” que recibe al audio de los navegadores de Internet y los introduce en la tarjeta de sonido y en otros programas, permitiendo incluso la grabación de audio.
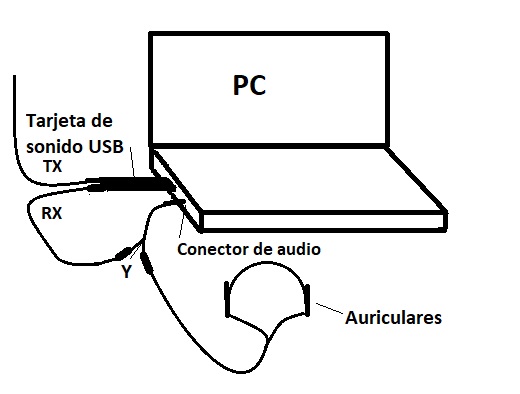
He comprobado que, en algunos PCs portátiles y torres que no incorporan en su placa base una tarjeta de audio Realtek, no aparece el dispositivo Mezcla Estéreo. En este caso, se complica algo la instalación (Figura 3a), porque entonces se debe utiliza una segunda tarjeta de audio externa USB (cualquiera de esas baratas de 3 euros sirve), para poder sacar el audio del Navegador por el conector de altavoz y volverlo a meter en esta tarjeta externa para la decodificación mediante una segunda versión de ROS, al tiempo que la tarjeta externa la utilizamos también para la salida del audio de la transmisión. Eso obliga a utilizar unos auriculares en los portátiles mediante una Y, porque al introducir un conector en la salida/entrada común de audio, se desconectan los altavoces propios del PC portátil.
En el caso de disponer de un PC tipo torre, se simplifica algo esta instalación (Figura 3b) porque se puede introducir el audio por la tarjeta auxiliar mediante una Y que lo separe de la salida de audio de los altavoces y podremos seguir escuchando el audio sin necesidad de unos auriculares adicionales, porque podremos mantener conectados los altavoces amplificados mediante una Y.
 |
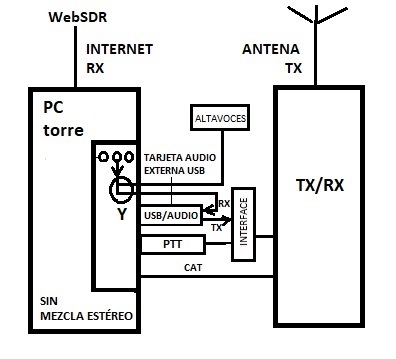 |
| Figura 3a: Un solo conector de audio | Figura 3b: Torre sin Mezcla Estéreo |
¿Por qué el modo ROS?
Al principio hacía las mismas pruebas tanto en modo ROS como en FT8, pero finalmente me decidí por utilizar solamente el ROS, porque en esta modalidad puedo hacer transmisiones más rápidas con el ROS16, si la propagación me lo permite (hasta -18 dB de S/N). Y cuando se pone más difícil, puedo aumentar la sensibilidad de la decodificación con el ROS4 hasta -20 dB de S/N, aunque sea cuatro veces más lento. ROS es más cómodo y rápido de manejar que el FT-8., con el que siempre te ves obligado a esperar a que finalice el período de recepción de 15 s, antes de que arranque la transmisión, mientras que en ROS la transmisión siempre es inmediata.
Por otra parte, he visto que las relaciones S/N que proporciona el ROS se ajustan más a lo que observo en el Smeter del receptor de Ordino calibrado en dBm. Aunque la lectura en dBm del Smeter no sean reales en valor absoluto, no me importa, porque no hay duda de que “las diferencias” de lecturas sí son muy exactas en todos los receptores SDR, porque comparan tensiones digitalizadas. Cuando las relaciones S/N son positivas, las lecturas de S(N en ROS se corresponden muy bien con las diferencias que observo en el Smeter de Ordino en dB. Es decir, la diferencia entre la lectura que marca el ruido en dB en ausencia de señal y el aumento que se observa en presencia de la señal de ROS, concuerda con la relación señal/ruido detectada por el ROS y coincide con la diferencia de lecturas del pico de su señal (no el promedio) con la relación S/N que observo en el Smeter.
En cambio, cuando contemplo la recepción del FT8, el programa de K1JT marca más o menos una S/N que muchas veces es la mitad del valor que me indican las diferencias en el Smeter de Ordino, con lo cual llego a la conclusión de que el programa FT8 calcula la relación señal/ruido de otra forma que se corresponde mucho menos con las comparaciones observadas con la recepción de señales SSB, en la que siempre se compara la lectura del pico de la señal en el Smeter con el promedio de la potencia del ruido en ausencia de señal. Así que en mi opinión el ROS da una indicación más fiable que el FT8 en cuanto se refiera a la ventaja comparativa del modo digital sobre la comunicación en SSB.
Dos instalaciones del ROS en el mismo PC
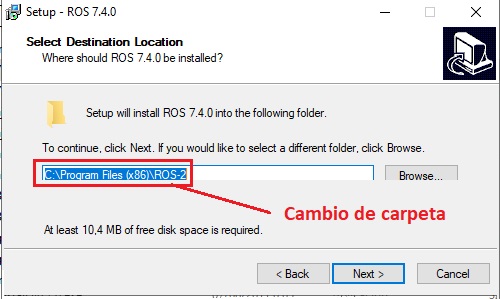
En el PC, dos instalaciones del ROS en el mismo ordenador que corran simultáneamente se consiguen muy fácilmente, cambiando simplemente la carpeta en que se instala la segunda versión del ROS, cuando nos el Windows nos solicita confirmar el destino de la instalación, tal como se observa en la figura 4.
 |
| Figura 4: Segunda instalación del ROS |
La primera versión la colocamos en la carpeta C:\Program_Files (x85)\ROS que nos propone por defecto el instalador de Windows, mientras que la segunda versión la colocamos en la carpeta C:\Program_Files (x86)\ROS-2. En el escritorio habrán aparecido 2 iconos iguales de acceso directo y simplemente le cambiamos el nombre a uno de ellos para distinguirlos y acceder al que nos interesa.
Las antenas
Las pruebas las realizo transmitiendo con 100 W a una antena V invertida tipo bigotes de gato (2 dipolos en paralelo) para 80 y 40 metros, con el vértice a 10 m de altura sobre el terrado, y en 60 metros uso esta misma combinación de dipolos en paralelo, sintonizados sin problemas en 5.35 MHz con el acoplador de antena del propio Flex.
En 20 metros, dispongo de una Yagi de 3 elementos dirigida más o menos hacia el norte, que me proporciona una ganancia adicional de unos 8 dB respecto a la V invertida, Tal vez ese sea la razón de que se consigan también unos resultados sorprendentes de decodificación en esta banda de los 14 MHz, como muestro a continuación, pues esos 8 dBs serian una multiplicación de potencia de 6,4 veces, lo que equivaldría a transmitir con unos 640 W, aparte de la ventaja multiplicadora de 1000 veces que proporcionan los sistemas digitales teclado a teclado.
Resultados obtenidos:
A lo largo de algo más de medio año, las probabilidades de que la decodificación de mis transmisiones en ROS sean decodificadas con pleno éxito en el receptor de Andorra han sido las siguientes:
80 m: 98 % (sólo ha fallado 2 veces en 89 intentos) Margen sobrante promedio: +24 dB
60 m: 88% (solo ha fallado 10 veces en 89 intentos) Margen sobrante promedio: +10 dB
40 m: 85% (Solo ha fallado 14 veces en 89 intentos) Margen sobrante promedio: +7 dB
20m: 79% (Solo ha fallado 9 veces en 43 intentos*) Margen sobrante promedio: +3 dB
*Nota: Las pruebas en 20 m se me ocurrió comenzarlas mucho más tarde, cuando ya llevaba 46 intentos en 80+60+40m.
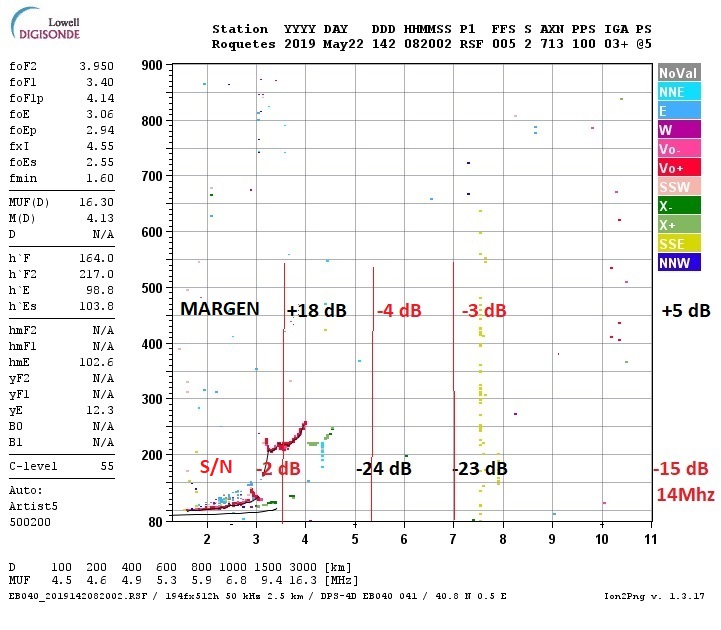
La ionosonda del Observatorio del Ebro
Siempre que realizo un intento de decodificación, grabo el estado de la ionosfera en ese momento, guardando en el PC la gráfica que proporciona a esa hora la ionosonda situada en el Observatorio del Ebro, en el pueblo de Roquetes, junto a la ciudad de Tortosa, en la provincia de Tarragona, a unos 160 km al sudoeste de Barcelona, y que se descarga en la dirección de la web: http://dgs.obsebre.es:8081/latestFrames.htm
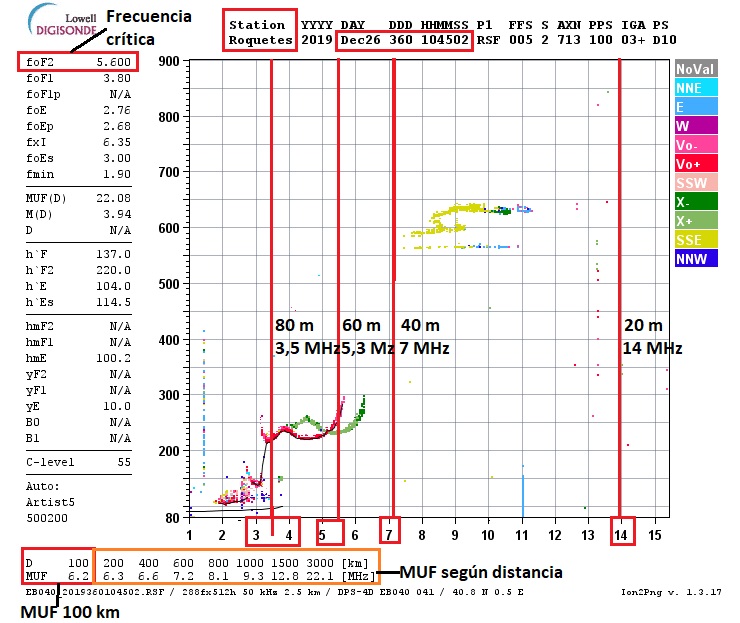
Esta gráfica, que se actualiza cada 5 minutos (Figura 5), muestra en el ángulo superior izquierdo la Frecuencia Crítica fo obtenida por rebote vertical, mientras que se calcula la MUF o Máxima frecuencia utilizable según la distancia (líneas inferiores) de salto, aunque yo solo me fijo en el dato para 100 km, pues es el más aproximado a la distancia de 140 km hasta Ordino.
 |
| Figura 5: Estado de la ionosfera dado por la ionosonda. |
En el gráfico de la ionosonda quedan reflejadas las capas de la ionosfera que le devuelven algún rebote vertical en un escaneado de 1 a 30 MHz, realizado por el radar TX/RX de la ionosonda, que según tengo entendido, transmite hacia el cenit con una potencia de 50 W y una antena de banda ancha, formada por dos Dobles Deltas Cruzadas de respuesta plana, gracias a que están cargadas las dos con una resistencia de 600 ohmios.
En el ángulo superior izquierdo, aparece la frecuencia crítica de rebote vertical, que es la máxima frecuencia que le refleja la capa F y devuelve al receptor. De ahí se deducen las frecuencias MUF (Máxima Frecuencia Utilizable) calculadas para cada ángulo de elevación y para cada distancia de salto, y que se detallan en la parte inferior desde 100 hasta 3000 km, distancias habituales de propagación por un solo salto en HF.
Un par de resultados muy normales
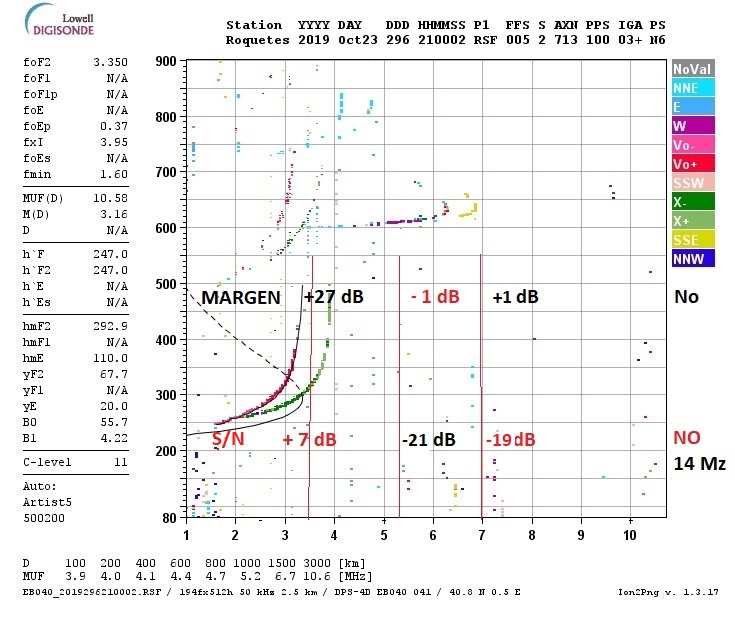
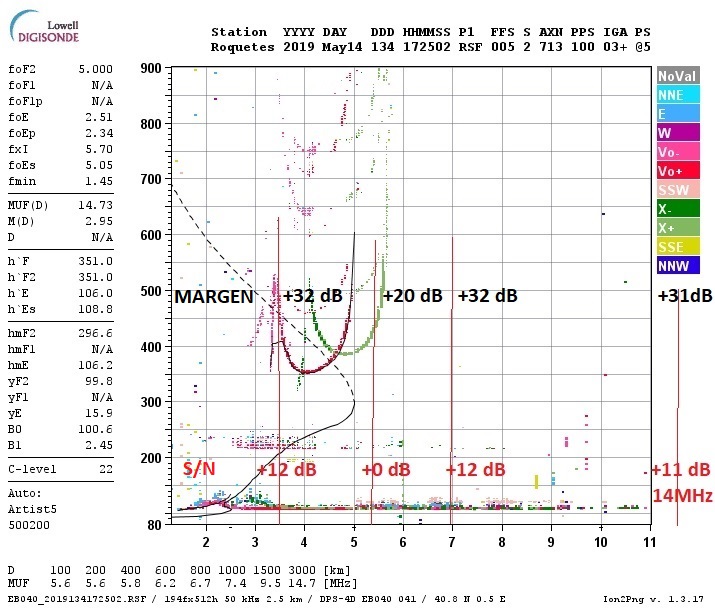
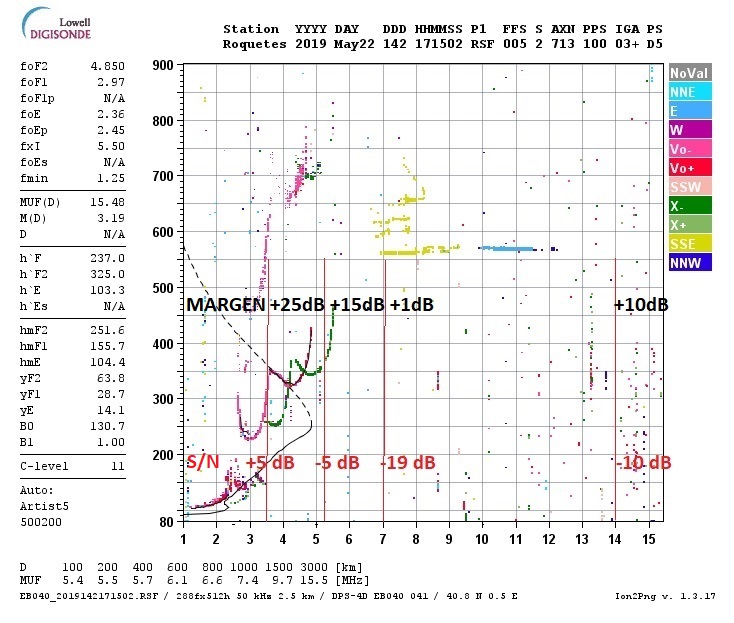
Aquí tenéis (Figuras 6a y 6b) un par de gráficas del estado de la ionosfera que podríamos llamar bastante normales. En la línea inferior con números en rojo y tituladas “S/N”, he colocado las cifras calculada por el ROS de la relación S/N de aquellas transmisiones decodificadas con éxito en cada frecuencia.
En el caso de que hubiera fallado la decodificación, las cifras S/N en esta línea inferior están en negro, aunque el ROS las haya detectado por debajo del ruido, Este programa consigue detectar la presencia de una señal ROS hasta con relaciones S/N de -24 y -25 dB, aunque por debajo de -20 dB no las decodifique correctamente. No sé cómo se las arregla ROS para detectarlas prácticamente siempre (99%).
En la línea superior indico en negro y con el rótulo “MARGEN” el margen sobrante para una decodificación correcta con ROS, sumándoles +20 dB a las relaciones S/N obtenidas en rojo en la línea inferior, puesto que su límite de decodificación normalmente está en -20 dB y ese es el margen que sobra por encima del límite. En cambio, si la decodificación del ROS ha fallado, las cifras calculadas del margen se indican arriba en rojo, especialmente si ha detectado su presencia, pero la ha decodificado con errores.
 |
 |
| Figura 6a: Propagación muy normal | Figura 6b: Propa. mejor de lo esperada. |
En la figura 6a, vemos lo que podríamos llamar un comportamiento normal de la ionosfera con una MUF de 5,1 Mhz a 100 km de distancia, lo que da como resultado que solo ha sido posible la comunicación NVIS con Ordino en 3,5 Mhz, con una señal muy sobrada con un margen de 28 dB, pero la decodificación correcta ya no ha sido posible ni en 5,3 ni en 7 ni en 14 MHz.
En la figura 6b, vemos que la ionosfera presenta una MUF a 100 km de 3,5 MHz pero todavía ha permitido la comunicación perfecta en 80 metros con un margen igual al anterior, aunque curiosamente también ha permitido la decodificación correcta en 7 Mhz con un margen muy escaso de 1 dB. ¿Cómo y por qué? No lo sabemos.
Lo más extraordinario de etas dos gráficas 6a y 6b es que, aunque no haya llegado a decodificarlas en 60 y 20 m, el programa ROS ha detectado la presencia de la señal y ha mostrado una relación S/N de la misma muy negativa, aunque haya fallado la decodificación correcta.
¿Una capa E permanente?
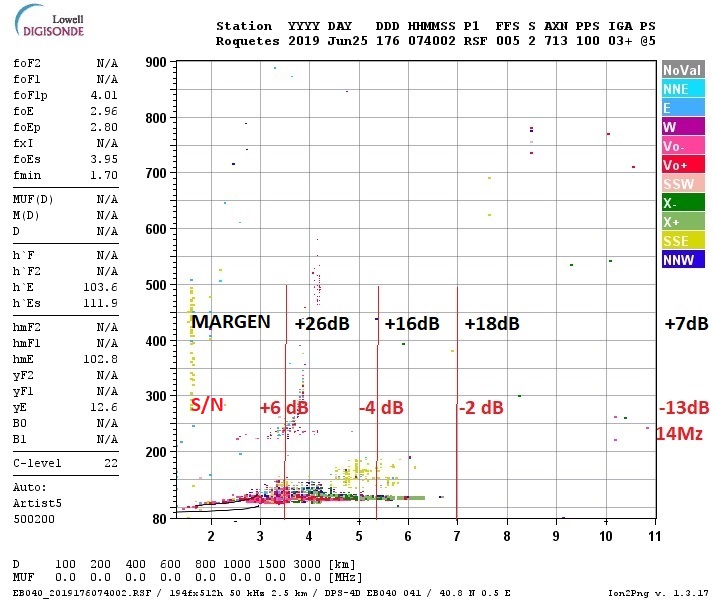
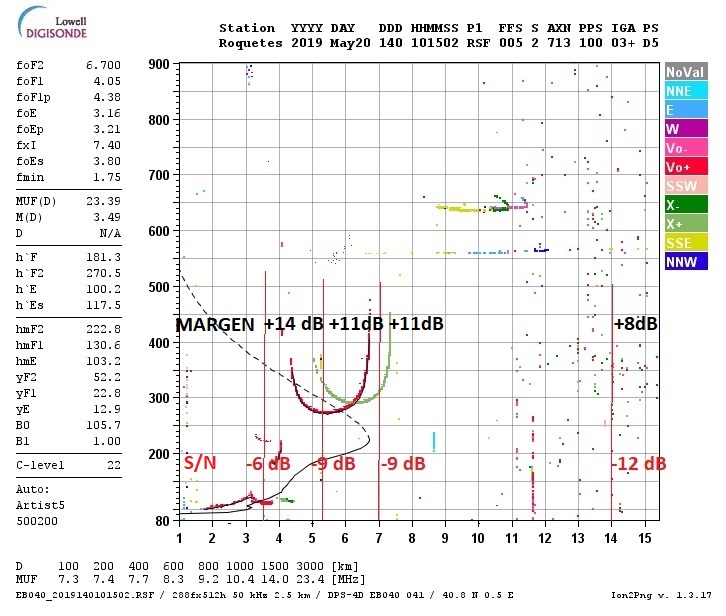
Ahora veremos los resultados ya más extraordinarios conseguidos con el estado de la ionosfera que se muestra en las figuras 7a y 7b, en las que se han obtenido decodificaciones perfectas en todas las bandas, incluso cuando la MUF estaba por los suelos y ni siquiera era medible (figura 7a) , aunque se advierte una incipiente capa E permanente y no esporádica, presente a 100 km de altitud que podría ser la responsable de que las señales NVIS sean decodificadas en todas las bandas con señales con mucho margen (Figura 7b), aunque su presencia visible no supere los 7 Mhz en ninguno de los dos casos, al menos por lo que se refiere a su detección por la ionosonda.
 |
 |
| Figura 7a: Incipiente capa E permanente | Figura 7b: Capa E claramente visible |
En cuanto a la figura 7b, parece como si esta capa E permanente sea claramente visible e intentara extenderse hasta frecuencias superiores a los 14 MHz, pues se consiguen comunicaciones en 20 m con señales extraordinarias, y no aparece una capa F en 14 MHz por ningún lado.
La presencia de esta capa E NO esporádica con una intensidad suficiente para permitir estas comunicaciones, ya se comentaba en algunos trabajos de investigación, como por ejemplo los de C. Hadoupis, de la Universidad de Creta: A tutorial Review of Sporadic E Layers, cuyo autor afirma rotundamente: “que hay suficientes evidencias de que existe una capa E permanente no esporádica en latitudes medias y bajas, que hay que tener en cuenta en los modelos de la ionosfera”.
¿Burbujas de ionización?
En las siguientes imágenes 8a y 8b, se muestran los resultados de comunicaciones conseguidas en todas las bandas con receptores en Ordino, incluso en 14 MHz, sin que la presencia de una capa E sea apreciable, de forma que la única explicación que nos queda son unas burbujas de ionización presentes en las frecuencias por encima de 10 MHz. Aunque en la figura 7a ni siquiera la MUF alcanza los 7 MHz y, sin embargo, se ha conseguido una perfecta decodificación en esta banda con un margen enorme.
 |
 |
| Figura 8a: ¿Burbujas de ionización en 14 MHz? | Figura 8b: ¿Burbujas de ionización en 14 Mhz? |
¿Backscatter?
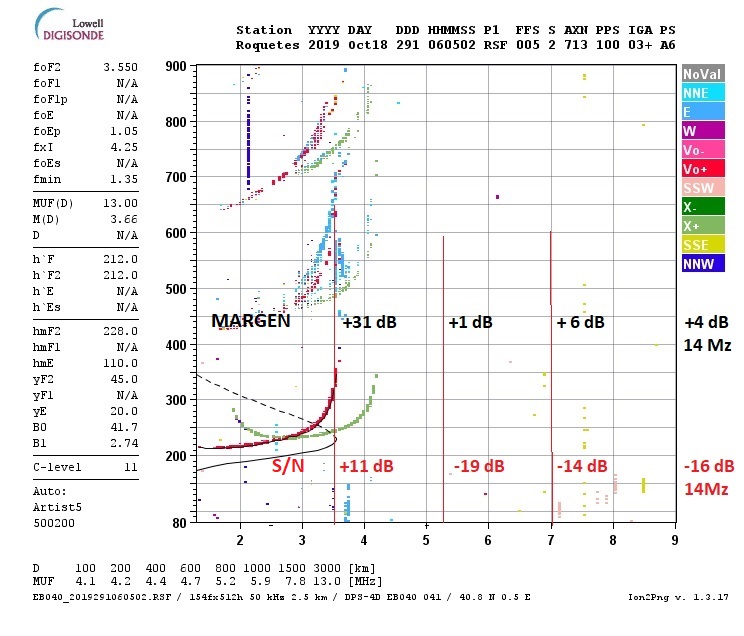
En las figuras 9a y 9b la situación de la ionosfera es aún más asombrosa, porque se observan decodificaciones perfectas obtenidas en 14 MHz con margen suficiente en horas nocturnas, pero con el misterio de que no hay burbujas de ionización, ni se insinúa ninguna capa E permanente, ni ninguna capa F que las explique.
 |
 |
| Figura 9a: ¿Backscatter en 14 MHz? | Figura 9b: ¿Backscatter en 14 Mhz? |
En los estudios realizados por el ingeniero de telecomunicaciones y radioaficionado de los Países Bajos Ben A. Witvliet, que lleva por título NearVertical Incidence Skywavw Interaction of Antenna and propagation mechanism (*) , en su página 60 se apunta al hecho de que se comprobó la existencia de una extraña propagación nocturna NVIS que no procedía de ángulos altos de radiación, como todas las comunicaciones diurnas NVIS, sino que se recibían con ángulos inferiores a 60º, lo que solo podría atribuirse a una propagación del tipo “backscatter” (dispersión y devolución hacia atrás). Eso significaría que primero se han propagado a gran distancia mediante un salto por reflexión y luego han vuelto re-emitidas hacia atrás en una nueva reflexión, hasta el receptor situado a distancia NVIS.
El problema de esta hipótesis es que presupone la presencia de una capa reflectora intermedia (por ejemplo una E permanente) cuya presencia en las figuras 7a y 7b en frecuencias superiores a 5 MHz no se detecta por ningún lado, tal vez porque su ionización es tan baja que no la detectan las ionosondas actuales, pero tal vez sea suficiente para el “backscatter”.
¿Dispersión troposférica?
Otra posible explicación sería que, dada la gran potencia equivalente de las transmisiones digitales sobre las comunicaciones en SSB, es posible que simplemente estemos hablando de que la comunicación se realiza por dispersión troposférica por fuerza bruta, un fenómeno que consiste en forzar la propagación con potencias muy elevadas enfocadas a un área común del espacio, para que simplemente la presencia de irregularidades en la troposfera de lugar a una dispersión de la onda electromagnética con el nivel suficiente para su recepción a gran distancia, de modo que se consigue una comunicación por dispersión sin saber demasiado bien el porqué.
De todos modos, este modo de propagación requeriría que siempre y a todas horas se consiguiera la decodificación y el contacto con pleno éxito y ya hemos visto que algunas veces falla, aunque casi siempre se ha producido, incluso cuando falla, la detección de la presencia de señales por el ROS con umbrales de -25 dB de S/N con tan solo uno o dos fallos en todas las pruebas, lo que indica que ha sido un problema de faltarle solamente unos pocos dBs más de ganancia.
Doppler inesperado
Si consideramos que la diferencia de calibraciones en Ordino que se contemplan en la figura 10 con el Flex-6500 es de 7,9 Hz, pues es la diferencia de lecturas que se produce más frecuentemente, pero no siempre, mientras que en Vilassar la diferencia de calibraciones de las mismas recepciones simultáneas muestra siempre -11,7 Hz constantes de desviación cuando la recepción allí de mis señales desde BCN es directa. Así que inesperadamente aparecen en Ordino en la figura 10 unas desviaciones diferentes de frecuencia producidas por un posible efecto Doppler con desviaciones suplementarias de +1,9 Hz y de -1,9 Hz en las recepciones (también en 40, y 60 m y rara vez en 80 m). Este es un posible efecto Doppler inesperado, que podría indicar que la reflexión NVIS se produce en elementos móviles, que tal vez sean aviones o tal vez sean debidas a las corrientes en chorro ionizadas que viajan a gran velocidad a la altura de la capa E (100 km) y dan lugar algunas veces a E esporádicas más intensas.
 |
| Figura 10: Doppler de 2 Hz y 4 Hz en Ordino en 20 m y en directo no. |
Como podéis comprobar en las recepciones simultáneas de las mismas transmisiones en directo en mi segundo QTH en Vilassar en 20 metros no se produce ningún Doppler en la recepción. Las recepciones se han realizado simultáneamente en directo a 25 km de BCN con un Funcube Pro+ idéntico a los colocados en Ordino y nunca se le ha visto la más mínima deriva de frecuencia de ningún tipo entre transmisiones y recepciones sucesivas.
Preguntado José Alberto Nieto Ros porqué aparecen estas cifras tan extrañas de desviación, siempre múltiplos de 1,9 Hz, me indica que efectivamente la determinación de la desviación de frecuencia en su programa ROS se produce con una precisión de 1,9 Hz, derivada del método de medida, mientras que en el FT8 esa unidad de medida es 1 Hz. Puntualizo aquí que también se producían etas mismas desviaciones con el FT8 en las recepciones en Ordino.
1,9 Hz sería el Doppler de un móvil con 1,9 X 300.000.000/14.000.000 = 40,7 m/s = 146 km/h
Tal vez esos Dopplers sean debidos a las corrientes en chorro que dicen que se mueven a 100 km de altitud y que dan lugar a las esporádicas E, y que se consideran responsables del aumento de la ionización, debido al cizallamiento producido entre capas de aire, por la agitación de las partículas metálicas que abundan a este nivel, procedentes de lluvias meteóricas, o sea granos de meteoros que se queman más o menos a esas alturas de la atmósfera. O podrían ser aviones cruzando transversalmente la trayectoria NVIS, con lo que esta reflexión se produciría a tan solo a 10 km de altura en lugar de a 100 km. Y además se producirían de un modo muy ocasional. No tengo medios para comprobar el ángulo de llegada.
Para mí, tiene preferencia la opción de los aviones sobre la de las corrientes en chorro, porque este efecto Doppler aparece durante uno o dos minutos y luego la frecuencia vuelve a la normalidad y hay muchos vuelos que pasan por los Pirineos hacia Barcelona y Baleares procedentes de Francia y otros países europeos y en dirección opuesta.
Conclusiones
Creo que estas pruebas demuestran que, a pesar de lo mal que nos trata ahora la ionosfera, las comunicaciones NVIS en modalidades digitales son siempre posibles en 80 m (98%), no solo de día sino también de noche, mientras que también son siempre factibles de día si no es en 80 m( raras veces po la absorción del mediodía), entonces son posibles en 60 o en 40 m, y muchas veces también en 20 m, aunque no sabemos el mecanismo que las posibilita, pero vale la pena estudiarlas más a fondo para llevarlas a la práctica para paliar las consecuencias de un posible blackout eléctrico, aunque confío en que tarde mucho en producirse y que yo no lo vea.
¿Alguien más se anima a experimentar?
Insisto en que el objetivo de este artículo es animar a otros radioaficionados a realizar también pruebas similares, para intentar mejorar nuestro conocimiento sobre la propagación NVIS en modos digitales y con ello contribuir de algún modo a llevar a la práctica una eficaz red de emergencia, especializada en estas modalidades de comunicación. Espero ver publicadas más noticias en estas páginas sobre otras pruebas realizadas por más radioaficionados..
(*) Nota. La tesis doctoral se titula NearVertical Incidence Skywavw Interaction of Antenna and propagation mechanism por Ben A. Witvliet Ph. Ben es Radio Science Research Manager en la Universidad de Bath (UK) y Visiting PostDoc Researcher en la Universidad de Twentee (NE). Su tesis doctoral es bien conocida en La Salle, porque Ben vino a Barcelona a realizar sus pruebas NVIS en latitudes inferiores a los 45º e Instaló 8 balizas transmisoras por toda Catalunya, con la ayuda de profesores de la Escuela Técnica de Telecomunicaciones de La Salle y miembros del Radioclub de la escuela, que le ayudaron en la instalación y comprobación de su recepción en Barcelona.
| 73 Luis EA3OG |